[video] Japanese scientists develop robot with living biological muscles
For now, it can only walk under water.
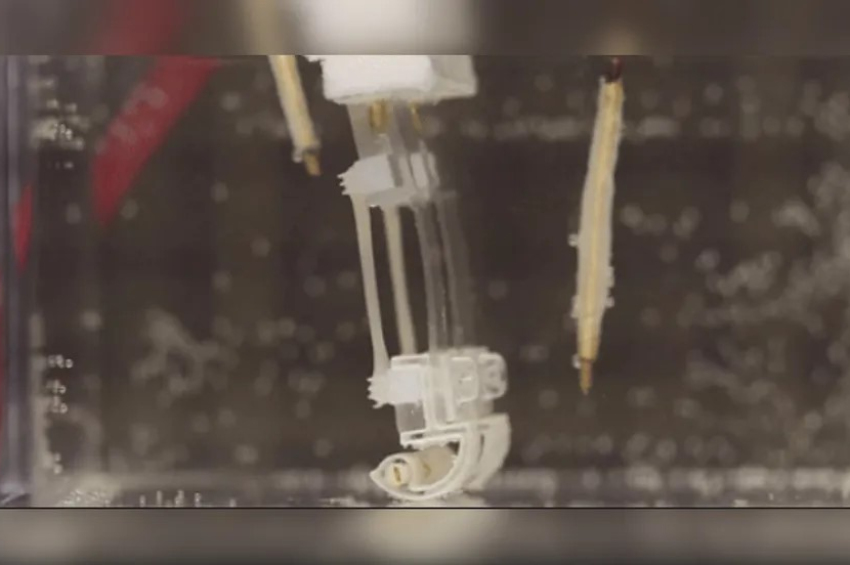
Researchers at the University of Tokyo have developed a two-legged biohybrid robot, which merges an artificial skeleton with biological muscle and is capable of walking and pivoting underwater.
While most biohybrid robots can move in straight lines or make large turns, they often struggle with precise movements in confined spaces, making them unsuitable for obstacle-rich environments like search and rescue operations. The new robot can pivot on one foot, allowing it to turn in a small circle, the university said in a press release.
Currently, it can only function underwater because its lab-grown muscles dry out quickly and lose effectiveness when exposed to air. However, the researchers anticipate future versions could walk on land by using thicker muscles with their own nutrient supplies and possibly covering them in artificial skin.
Imagining a robot made of living muscle on an artificial skeleton might conjure images of a part-human, part-machine cyborg. Scientists are still in the early stages of creating biohybrid robots. Developing real-life biohybrid robots that can walk like humans, let alone run, is a significant challenge.
Professor Shoji Takeuchi and his team from the Graduate School of Information Science and Technology at the University of Tokyo are tackling this challenge in their latest research.
More to read:
Scientists create ugly Terminator-like robot with living skin
“By incorporating living tissues as part of a robot, we can utilize the superior functions of living organisms.
In our latest research, we combined lab-grown skeletal muscle tissue with flexible artificial legs and 3D-printed feet. Using the muscle tissue to move the legs allowed us to create a small robot with efficient, silent movements and a soft touch,” explained Takeuchi.
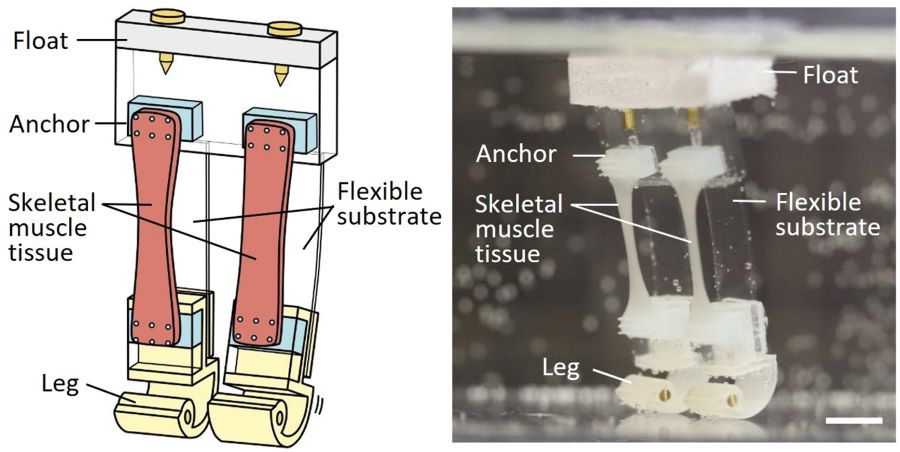
The researchers began by growing skeletal muscle in molds to create strips. Because the muscle tissue loses its ability to move when it becomes too dry, the robot was designed to operate underwater. The team constructed a lightweight skeleton from a floating styrene board, a flexible silicone-based body, acrylic resin legs with brass wire weights, and 3D-printed feet. Two strips of muscle tissue were attached from the body to the feet of the robot, completing the legs.
More to read:
Scientists develop tiny robots that navigate through veins
Each leg was stimulated using hand-held gold electrodes to deliver a charge, similar to how our brain sends electrical signals to the body to move. This caused the muscle tissue to contract, enabling the robot to “walk” when the legs were stimulated alternately. By stimulating each leg at five-second intervals, the robot moved at a speed of 5.4 millimeters per minute. Although this may not seem fast, the speed of its leg movements was comparable to other biohybrid robots.
The team is now exploring how to create a smoother-moving robot that can walk on land by developing methods to stimulate the muscles remotely and creating thicker muscles with a nutrient supply to sustain them.
The research was published in the biology journal Matter.
***
NewsCafe relies in its reporting on research papers that need to be cracked down to average understanding. Some even need to be paid for. Help us pay for science reports to get more interesting stories. Use PayPal: office[at]rudeana.com or paypal.me/newscafeeu.



Copyright © 2021 All Rights Reserved.